 日本語
日本語 English
English français
français Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 한국의
한국의 Tiếng việt
Tiếng việt


今すぐお電話ください
TEL : + 86-4000988557;
スカイプ ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.

世界の製造業における産業用ロボットの現在の密度が55であるのに対し、 中国の の密度を考慮すると産業用ロボットはわずか21であり、 よりはるかに低い 日本、韓国、ドイツ、米国などの先進国のそれ、そしてインテリジェントな製造の文脈では、 "機械 代替" の方針引き続き 実装されます。 成長の余地はまだたくさんあります。 イノバンス などの関連コンセプト企業テクノロジー、ロボティクス、 Zhiyun 株式会社 Keyuan Co.、Ltd。、および Qinchuan 工作機械はロボットの下でより良い開発を達成します 配当
産業用ロボットの開発段階
産業用ロボットの開発は通常、 に に分けることができます。 3つの 世代:
1. 第一世代の産業用 ロボット:
通常、 「プログラム可能 」を指します産業用 ロボット」 現在、国際的に商品化および使用されており、 「教育 」としても知られています。産業用ロボットの再生」、つまり、産業用ロボットが特定のタスクを完了するために、オペレーターは最初に タスクを完了します。 あらゆる種類の知識 ( 運動軌道、動作条件、動作シーケンス、動作時間など など) 産業用ロボットの数は 「教える」ことができます 直接的または間接的に 手段 産業用ロボットがこの知識を記憶した後、 彼ら できる 「再現」 指示は、一定の精度範囲内で、さまざまな教えられた行動を忠実に再現します 繰り返し 1962年、最初の ユニメート アメリカ合衆国のユニバーサルオートメーションの産業用ロボットが に 入れられました米国のゼネラルモーターズで使用され、第1世代の産業用ロボットの誕生を示しています。
2、第2世代の産業用 ロボット:
通常は "インテリジェント ロボット" を指しますある種の知性を持っている (タッチ、フォース、ビジョンなど など) それ つまり、センサーがタッチ、力、視覚などの情報を受信した後、コンピューターが ロボット を制御します。対応する適切な 操作を完了するためのオペレーティングマシン。 1982年、米国のゼネラルモーターズは、産業用ロボットに組立ラインにビジョンシステムを装備し、新世代のインテリジェント産業用ロボットの登場を発表しました。
3、第3世代の産業用 ロボット:
いわゆる 「唯一のタイプ 産業用 ロボット」です。 知覚機能だけでなく、特定の 意思決定 もあります。と計画 機能 第一世代の産業用ロボットはまだ実験室での研究段階にあります 段階 誕生-成長-成熟 の後時代、産業用ロボットは製造業に欠かせないコア機器になりました 産業 世界には約75万台の産業用ロボットが、すべての生産ラインで労働者や友人と並んで戦っています。
ロボットファミリーの新星として、特別なロボットは から 来る傾向があります 彼ら のために遅れている幅広い 用途 ヒューマノイドロボット、農業用ロボットなど、さまざまな目的のための特別なロボット サービスロボット、水中ロボット、医療用ロボット、軍事用ロボット、娯楽用ロボットが登場しました、 そして それは に向かって 動いています急速なペースでの実用性
産業用ロボットの分類
産業用ロボットは に に分割できますさまざまな方法による次のタイプ
1. 産業用ロボットは に に分割されます マニピュレータの座標形式に応じた次のカテゴリ: ( 座標形式は、マニピュレータのアームが 移動しているときに 取得する参照座標系の形式を指します。)
(1) デカルト座標産業用ロボット
その運動部分は、3つの相互に垂直な直線運動 (つまり PPP)で構成され、その作業空間は 長方形です。 各軸での移動距離は、各座標で直接読み取ることができます 軸。 直感的で、位置と姿勢のプログラミングと計算が簡単で、位置決め精度が高く、結合制御がなく、構造が単純ですが、ボディは大きなスペースを占めます。動作範囲が狭く、柔軟性が低く、他の産業用ロボットとの調整が困難です。
(2) 円筒座標産業用ロボット
その運動形態は、1回転と2運動で構成される運動システムによって実現されます。その作業スペースは 円筒形です。 直交座標の産業用ロボットと比較して、同じ作業スペース条件下で、体は小さな 体積を占めます。 可動域が広く、その位置精度はデカルト座標ロボットに次ぐものであり、他の産業用ロボットとの協調は困難です。
(3) 球面座標産業用ロボット
極座標産業用ロボットとも呼ばれ、その腕の動きは2つの回転と1つの直線運動で構成されます (つまり、 RRP、1つの回転、1つのピッチング、1つの伸縮運動 ) その作業スペースは球体であり、ピッチングを上下させることができます 動き そして 調整されたワークを地面でつかんだり、低い位置を教えたりすることができ、その位置精度は高く、位置誤差はアームの長さに比例します。
(4)多関節 産業用ロボット
回転座標産業用 ロボット としても知られています。この産業用ロボットの腕は、人間の上肢に似ています 体 最初の3つのジョイントは回転ジョイントです (RRR)。 産業用ロボットは通常、支柱と大小のアームで構成されています。柱と大腕が形成され、肩関節、上腕、前腕の間に肘関節が形成され、上腕を回転させてピッチングとスイングを行い、下腕をピッチングさせることができます。その構造は最もコンパクトで柔軟性があり、 フットプリントが最小です。 他の産業用ロボットと連携して動作することはできますが、位置精度が低く、バランスの問題があり、制御 結合があります。 これ 産業用ロボットのタイプはますます広く使用されています
(5)平面 関節型産業用ロボット
可動関節と2つの回転関節(PRR)を使用し、可動関節は上下の動きを実現し、2つの回転関節は前後、左右の動きを制御します。 これ 産業用ロボットの形態は、 (スカラ (選択 コンプライアンス組立ロボット アーム) 組立 ロボット としても知られています。 水平方向に柔軟性があり、垂直方向に大きな剛性があります。 シンプルな構造と柔軟な動きで、主に組み立て 操作に使用されます。 特に、プラグインや電子機器業界での組み立てなど、 小型 部品のプラグイン組み立てに適しています。
2. 産業用ロボットは に に分割されます運転モードに応じた次のカテゴリ モード:
(1) 空気圧産業用ロボット
これ 産業用ロボットのタイプは、圧縮空気を使用して マニピュレータを駆動します。 その利点は、便利な空気源、迅速なアクション、シンプルな構造、低コスト、そして汚染がないことです。欠点は、空気が圧縮可能であるため、作業速度が低下することです 安定性 発生源の圧力は一般に約6kPaであるため、このタイプの産業用ロボットのスナッチ力は小さく、通常は数十ニュートンであり、最大値は 以上 です。 100 ニュートン。
(2) 油圧産業用ロボット
油圧は よりはるかに高い 空気圧は一般に約70kPaであるため、油圧トランスミッション産業用ロボットのスナッチ容量は大きく、数千ニュートンに達する可能性があります。 これ このタイプの産業用ロボットは、コンパクトな構造、スムーズな伝達、敏感な動作を備えていますが、シーリングの要件が高く、高温または低温での作業には適していません 環境
(3) 電気産業用ロボット
これ は、 理由 だけでなく、最も使用されているタイプの産業用ロボットです。多種多様な電気モーターの中で、産業用ロボットの設計にさまざまなオプションを提供しますが、 理由 彼ら さまざまな柔軟な制御を使用できます 方法 初期の頃は、ステッピングモーターを使用して駆動し、その後、DCサーボドライブユニットが開発されました。現在、ACサーボドライブユニットも急速に開発されています。 これら ドライブユニットは、マニピュレータを直接駆動するか、減速後に高調波減速機などのデバイスを介して駆動されます。構造は非常にコンパクトで シンプルです。
産業用ロボット制御システム
ロボットシステムの構造は、 ロボット で構成されています。メカニズム部分、センサーグループ、制御部分、情報処理 部分 制御システムはロボットのコア部分です 業界
1. 産業用ロボット制御システムが実現する機能
ロボット制御システムは、特定のタスクを完了するためにマニピュレータを制御するために使用されます。その基本的な機能は次のとおりです 次のとおりです:
(1) メモリ 機能:
ジョブシーケンス、移動パス、移動モード、移動速度、および生産に関連する情報を保存します プロセス
(2) 教育 機能:
オフライン プログラミング、オンライン教育、間接 教育 オンライン教育には、教育ボックスとガイド付き 教育が含まれます。
(3) 周辺機器との接触機能 機器:
入出力インターフェース、通信インターフェース、ネットワークインターフェース、同期 インターフェース
(4) 座標設定 機能:
4つの座標 システムがあります: ジョイント、アブソリュート、ツール、および ユーザー定義
(5) 人間解体 インターフェース:
ティーチングボックス、操作パネル、ディスプレイ 画面
(6) センサー インターフェース:
位置検出、視覚、タッチ、力など。
(7) 位置サーボ 機能:
ロボット 多軸 リンケージ、モーションコントロール、速度と加速度のコントロール、動的補正など。
(8) 故障診断安全保護 機能:
システムステータスの監視 中 操作、障害状態および障害下での安全保護 自己診断
2. 産業用ロボット制御システムの構成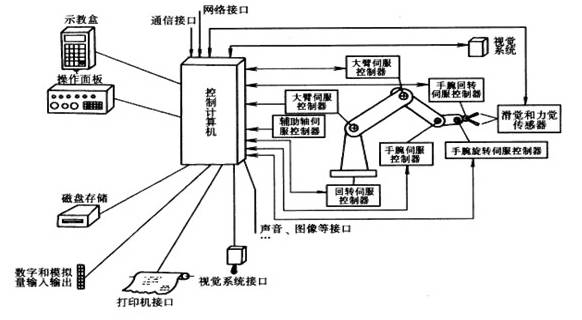
ロボット制御システムのブロック図
(1) 制御 コンピューター:
制御システムのディスパッチおよびコマンド編成 システム 一般に、マイクロコンピューターとマイクロプロセッサーは、 Pentium のように32ビット、64ビットなどです。シリーズCPUおよびその他のタイプの CPU。
(2) 教育 ボックス:
ロボット を教える作業軌道とパラメータ設定、および human-computer 相互作用、独自の独立したCPUとストレージユニットを持ち、シリアル通信を通じてホストコンピュータとの情報相互作用を実現します。
(3) 操作 パネル:
さまざまな操作ボタンとステータスインジケータで構成され、基本的な機能 操作のみを完了します。
(4) ハードディスクとフロッピーディスク ストレージ:
ロボットの作業を保存するための周辺メモリ プログラム
(5) デジタルおよびアナログ入力および 出力:
さまざまなステータスおよび制御コマンドの入力または出力
(6) プリンター インターフェース:
出力する必要があるさまざまな情報を記録します。
(7) センサー インターフェース:
は、情報の自動検出に使用され、ロボットのコンプライアンス制御、通常は力、タッチ、視覚のセンサーを実現します。
(8) 軸 コントローラー:
ロボットの関節の位置、速度、加速度を完了します 制御
(9) 補助装置 制御:
グリッパー など、ロボットと連携する補助装置を制御するために使用されます。ポジショナーなど
(10) 通信 インターフェース:
ロボットと他のデバイス、一般的にはシリアルインターフェース、パラレルインターフェースなどの間の情報交換を実現します。
(11) ネットワークインターフェース
1) イーサネット インターフェース: 複数または単一のロボットの直接PC通信はイーサネットを介して実現でき、データ転送速度は最大10Mbit / sであり、アプリケーションプログラムはWindowsライブラリ機能とtcp / ipを使用してPC上で直接プログラムできます。通信プロトコルをサポートし、データとプログラムを に ロードすることができます。イーサネットを介した各ロボットコントローラー インターフェース
2) フィールドバス インターフェース: さまざまな人気のある フィールドバス をサポートしますデバイスネット、abリモートI / O、Interbus-s、profibus-DP、M-NETなどの仕様。
3. 産業用ロボット制御システムの分類
(1) プログラム制御 システム:
各自由度に一定の規則的な制御機能を適用すると、ロボットは必要なスペースを実現できます 軌道
(2) 適応制御 システム:
いつ 外部条件が変化し、必要な品質を確保したり、経験を積んで管理品質を向上させたりするために、操作機の状態やサーボエラーの観察に基づいて、パラメータを調整します。非線形モデル まで エラー まで 消えます。 このシステムの構造とパラメーターは、時間と 条件 によって自動的に変化する可能性があります。
(3) 人工知能 システム:
モーションプログラムを事前にコンパイルすることはできませんが、取得した周囲の状態情報に基づいて制御効果をリアルタイムで決定する必要があります。 モーション。
ドライブ モード: 産業用ロボットドライブ システム を参照してください。
演習 方法:
(4) ポイント タイプ:
パス; に関係なく、ロボットがエンドエフェクタのポーズを正確に制御する必要があります。
(5) トラック タイプ:
ロボットが軌道と速度に従って動く必要があります 教えられました。
(6) 制御 バス:
国際標準バス制御 システム VME、MULTIバス、STDバス、 PCバスなどの制御システムの制御バスとして国際標準バスを使用します。
(7) カスタムバス制御 システム:
メーカーが定義して使用するバス それ自体 制御システムとして使用されます バス
(8) プログラミング メソッド:
物理設定プログラミング システム オペレーターは、固定リミットスイッチを設定して、開始と停止のプログラム操作を実現します。これは、単純なピッキングと配置の操作にのみ使用できます。
(9) オンライン プログラミング:
情報を操作する記憶プロセスプログラミング方法は、直接教育を含む人間の教育を通じて完成します (すなわち 手から手へ 教育) シミュレーション教育および教育ボックス 教育。
(10) オフライン プログラミング:
実際のロボットに直接教えるのではなく、 から を分離します。実際の作業環境、教育プログラムの生成、およびロボットの軌道のリモート生成 オフライン 高レベルのロボットとプログラミングを使用して 言語
4. ロボット制御システムの構造
ロボット制御システムは に に分割できます 彼ら による3つのカテゴリー制御 メソッド。
(1) 集中制御システム (集中 制御 システム): 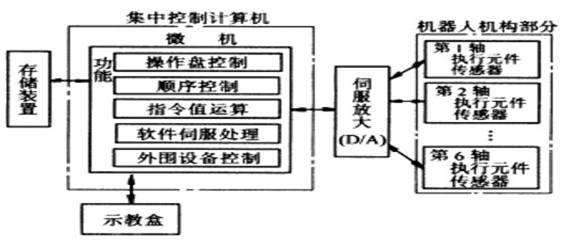
集中制御システムのブロック図
すべての制御機能を実現するためにコンピューターが使用されます。構造はシンプルでコストも安いですが、リアルタイムのパフォーマンスが悪く、 拡張するのが難しいです。 これ 構造は初期の ロボットでよく使用されます。 ブロック図を 図 に示します。
PCベース 集中制御システムは、PCリソースのオープン性を最大限に活用し、優れた オープン性を実現できます: さまざまなコントロールカード、センサーデバイスなどを に統合できます 標準 PCI による制御スロットまたは標準のシリアルポートとパラレル ポート を介して システム。
集中制御システムの利点は 次のとおりです: 低ハードウェアコスト、簡単な情報収集と分析、システムの最適制御の実現、より優れた整合性と調整、そしてより便利な PCベース システムハードウェア 拡張 その欠点も 明らかです: システム制御には柔軟性がなく、制御の危険性は 集中しやすいです。 障害が発生すると、その影響は大きく、結果は 深刻です。 なぜなら 産業用ロボットのリアルタイム要件は非常に高く、 いつ システムは大量のデータ計算を実行するため、リアルタイムのパフォーマンスが低下します。 システム マルチタスク への応答性 システム とも競合しますリアルタイム パフォーマンス; さらに、 システムの 複雑な配線は システム を削減します 信頼性。
(2) マスタースレーブ 制御 システム:
マスターとスレーブの使用 2レベル システム のすべての制御機能を実現するプロセッサメインCPUは、管理、座標変換、軌道生成、システム自己診断などを実現します。 など; スレーブCPUは、すべての ジョイントのモーションコントロールを実現します。 図 に示すように、その構成ブロック図
マスタースレーブ 制御システムは優れたリアルタイム性能を備えており、 高精度 に適しています。と高速制御ですが、システムのスケーラビリティが低く、メンテナンスが困難です。 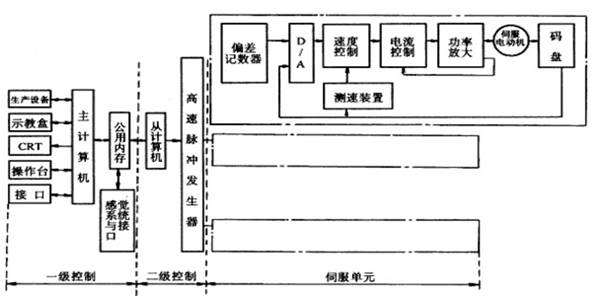
マスターおよびスレーブ制御システムのブロック図
(3) 分散制御 システム:
システムの性質と方法に応じて、システム制御は に に分割されます。いくつかの モジュール。 各モジュールには、異なる制御タスクと制御戦略があります。各モードは マスタースレーブ にすることができます関係または同等の 関係。
これ メソッドは、優れたリアルタイムパフォーマンスを備え、高速、 高精度 を簡単に実現できます。制御、拡張が容易、インテリジェントな制御を実現できます。これは 現在 で人気のある方法です。
主なアイデアは 「分散型 制御、集中型管理」です。つまり、システムは全体的な目標とタスクを包括的に調整および割り当て、 サブシステムの調整を通じて制御タスクを完了することができます。 システム全体が機能的、論理的、そして 物理的です。 分散型であるため、dcsシステムは分散制御システムまたは分散制御システムとも呼ばれます。
この構造では、サブシステムはコントローラーとさまざまな制御対象オブジェクトまたはデバイスで構成され、各サブシステムは ネットワークを介して相互に通信します。 分散制御構造は、オープンでリアルタイムかつ正確なロボット制御システムを提供します。 2レベル 制御方法は、分散システムでよく使用されます。
2レベル 分散制御システム。通常、上位コンピューター、下位コンピューター、および ネットワークで構成されます。 上のコンピューターはさまざまな軌道計画と制御アルゴリズムを実行でき、下のコンピューターは補間と細分化と制御の研究と実現を実行できます 最適化 上位のコンピューターと下位のコンピューターは、通信 バス を介して相互に連携して動作します。ここでの通信バスは、RS-232、RS-485、 EEE-488 の形式にすることができます。および USB バス。
さて、イーサネットと フィールドバス の開発テクノロジーは、ロボットに高速で安定した効果的な通信サービスを提供します。特に、双方向 マルチノード を実現するために生産現場に適用されるフィールドバス マイクロコンピュータ化された 間のデジタル通信測定および制御機器により、新しいタイプのネットワーク統合完全分散制御を形成します システムフィールド バス制御システムfcs (ファイル バス制御 システム) )。
工場の生産ネットワークでは、 を介して接続できるデバイス フィールドバス まとめて "フィールド デバイス / 機器"と呼ばれます。 から システム理論の観点から、工場の生産設備の1つである産業用ロボットは、フィールド 設備 として要約することもできます。 フィールドバス の導入後ロボットシステムの技術は、工業生産におけるロボットの統合をより助長します 環境 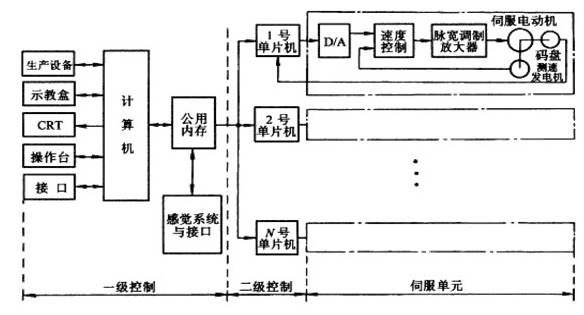
分散制御システムのブロック図
分散制御システムの利点は 次のとおりです: システムの柔軟性が高く、制御システムのリスクが軽減され、 マルチプロセッサ が使用されます。分散制御は、システム機能の並列実行に役立ち、システムの処理効率が向上し、応答時間が短縮されます。
用 複数の自由度を備えた産業用ロボットである集中制御は、各制御軸間の結合関係を非常にうまく処理し、簡単に 補正することができます。 ただし、 いつ 軸の数が増えると制御アルゴリズムが非常に複雑になり、その制御性能が 低下します。 さらに、 いつ システムまたは制御アルゴリズムの軸の数が非常に複雑になると、 システムの再設計につながる可能性があります。 対照的に、分散構造の各運動軸はコントローラーによって処理されます。つまり、システムは軸間の結合が少なく、システムの再構成が高くなります。
"業界 4.0" 蒸気機関、電化、 自動化に続く4番目の産業革命を指します。 従来の産業とデジタル情報技術を組み合わせ、ビッグデータやクラウドなどの技術を活用してインテリジェントな生産を実現します コンピューティング 中国では、 "業界 4.0" 国の のアップグレードを意味します製造業 産業 用 このため、中国は特に "Made in china 2025"の開発目標を掲げています。 目標は から に移動することです 2025年までに主要な製造国から強力な製造国へ。

TEL : + 86-4000988557;
スカイプ ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.




















読んで、投稿を続け、購読してください。 何 を教えてください。あなた 考える
 IPv6 サポートされているネットワーク 粤ICP备2021036697号
IPv6 サポートされているネットワーク 粤ICP备2021036697号 オンラインサービス
オンラインサービス 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com