 日本語
日本語 English
English français
français Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 한국의
한국의 Tiếng việt
Tiếng việt


今すぐお電話ください
TEL : + 86-4000988557;
スカイプ ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.

産業用ロボットは 多関節 マニピュレータまたは 複数の自由度 産業分野向けの機械装置 自動的に作業を行うことができ、さまざまな機能を実現するために独自の電源と制御機能に依存するマシンです。人間が命令することができ、 事前に準備された に従って実行することもできます。 プログラム。 現代の産業用ロボットは、人工知能によって確立された原則とガイドラインに従ってタスクを実行することもできます テクノロジー

ISO に準拠した最初の産業用ロボット標準は 1937 にビルグリフィステイラーによって作成されましたそして3月にメカノマガジンに掲載されました 1938。 これ 鶴のような 産業用ロボットはメカノ部品でできており、単一の電気モーターで駆動されます。 これ 産業用ロボットは、 事前にプログラムされた で木製のブロックを積み重ねることができます 方法。


▲ ジョージ デイバー
ロボット工学は 学際的 力学、電子工学、コンピュータサイエンス、制御、人工知能、物理学、および 数学の分野を組み合わせた分野。 産業用ロボットは、6つの基本的な コンポーネントで構成されています: 動的ユニット、 アームの終わり 機械、デジタルコンピューターコントローラー、アクチュエーター、入力デバイス、 検出器

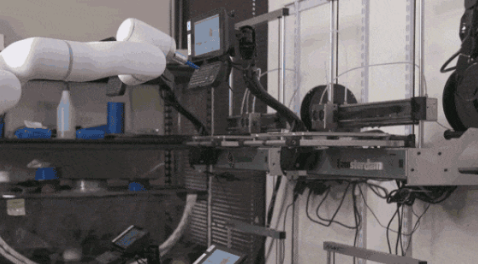

▲ abb産業用ロボットが完成 "ファンタ タンク" チャレンジ
明確な 構成: 関節アームは最も一般的なロボットアームであり、人間の腕に非常によく似ています。通常 6軸 マシン、 それら 冗長性を提供し、 スムーズに移動します。
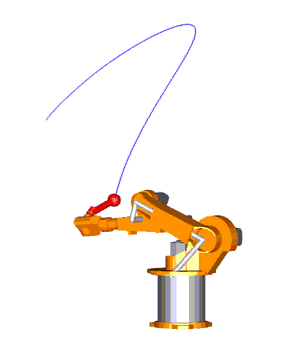
▲ 関節式ジョイント構成

▲ スカラ 構成ジョイント構成
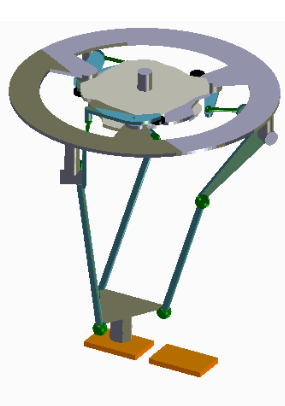
▲ 並列産業用ロボット
パラレルメカニズムは、 閉ループ として定義できます。移動プラットフォームと固定プラットフォームが少なくとも2つの独立した キネマティック によって接続されているメカニズムチェーンの場合、メカニズムには2つ以上の自由度があり、 並列に駆動されます。
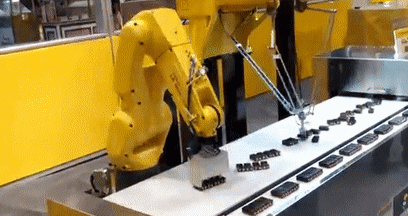
産業用ロボットの典型的な用途には、溶接、塗装、組み立て、収集、配置 ( パッケージング、 パレタイジング 、SMTなど)、製品の検査とテストなどがあります。すべてのタスクは、高効率、耐久性、速度、および 精度で完了します。
作業タスクをより正確に実行するために、産業用ロボットには通常、マシンビジョンサブシステムが それら として含まれています。強力なコンピューターまたは コントローラーに接続されたビジョンセンサー 用 現代の産業用ロボット、 人工知能ロボットますます重要になっています 機器

TEL : + 86-4000988557;
スカイプ ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.




















読んで、投稿を続け、購読してください。 何 を教えてください。あなた 考える
 IPv6 サポートされているネットワーク 粤ICP备2021036697号
IPv6 サポートされているネットワーク 粤ICP备2021036697号 オンラインサービス
オンラインサービス 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com