 日本語
日本語 English
English français
français Deutsch
Deutsch русский
русский español
español português
português العربية
العربية 한국의
한국의 Tiếng việt
Tiếng việt


今すぐお電話ください
TEL : + 86-4000988557;
スカイプ ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.

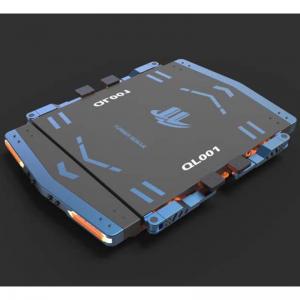
最新の 単腕協働ロボット ABBYuMiシリーズ

ABBが発表したこの新型ロボットは、可搬重量が500グラムです。非常にコンパクトな設計により、既存の組立ラインに統合でき、お客様の生産効率向上に貢献します。また、ガイド付きプログラミング機能も搭載されているため、オペレーターは追加の専門トレーニングを受ける必要がありません。この新型YuMiシリーズ単腕協働ロボットは2018年に正式リリースされ、ABB Abilityデジタルソリューションと連携することで、お客様の生産効率と信頼性を新たなレベルに引き上げます。
KUKA LBRiiwa 軽量ロボット

KUKALBRiiwaは、量産型センシティブロボットとして世界初の製品であり、ヒューマンマシンコラボレーション機能も備えています。LBRは「Light Robot(軽量ロボット)」、iiwaは「Intelligent Industrial Work Assistant(インテリジェント産業作業アシスタント)」の略称で、インテリジェントな産業作業アシスタントを意味します。LBRiiwaは2つのモデルから選択可能で、それぞれ耐荷重は7kgと14kgです。LBRiiwaは関節トルクセンサーを介して接触を即座に認識し、力と速度を瞬時に低減します。挟み込みやせん断を引き起こす可能性のある部品を一切使用せず、位置制御とバッファ制御によって繊細なワークピースをハンドリングします。
ファナック CR-35iA

CR-35iA
協働ロボット
ファナックが2015年に発表した新型協働ロボット。可搬重量は35kgで、現在世界最大の協働ロボットです。安全柵を必要とせず、人とロボットが一定の作業エリアを共有して作業を行うことができます。
CR-35iAと手作業の併用は、自動車産業、包装産業など、様々な産業で応用できます。手作業は重労働だが単純作業から解放され、熟練を要する作業に集中できるようになり、作業者の安全性も向上します。システムの効率性も向上します。
カワサキ双腕ロボット duAro

duAroマシンの人体には、胴体から水平に伸びる2本のロボットアームが取り付けられており、2本のロボットアームはペアで作業を行います。作業者と同等のスペースに設置でき、作業者が両腕で行う作業を代替することができます。また、作業者との連携作業も可能です。作業者がロボットに衝突した場合、衝突検知機能によりロボットを停止させることができます。特定の動作中は、ロボットアームに内蔵されたモーターに流れる電流を監視し、異常値を検出すると衝突と判断してロボットアームを停止させます。
また、教示方法としては、作業者が実際にロボットアームを動かして教示する直接教示のほか、タブレットパソコンなどを利用して教示することも可能となっている。
安川電機の新型小型ロボット「MotoMINI」

安川電機のMotoMINIは世界クラスの 産業用小型6軸ロボット MotoMINIは設置位置の変更が容易で、マンマシン協調作業など自由度の高い作業を実現します。小型部品の組立・操作、電子・電気部品の挿入などに活用されています。MotoMINIは小型軽量、高速、高精度という3つの大きな特徴を備えています。MotoMINIは500gの可搬重量、最大伸長距離350mm、重量約7kgと軽量で、小型の可搬型ロボットによる小型製品の生産・加工の可能性を実現しました。
Comauのヒューマンロボット協働ロボットAURA

Comauのヒューマンロボット協働ロボットAURAは、人やその他の自動化コンポーネントとの近接・接触、そして接触の強さを、初めて多感覚的に共通認識する機能を統合しました。レーザースキャナーを用いて人の位置を動的に特定することで、ロボットはオペレーターに接近したり接触したりする際に減速し、完全に停止することが可能になります。AURAは接触を感知すると、オペレーターのニーズにも応えます。
ロボット コントローラーにはビジョン システムも統合されており、ロボットの動作エリアへの人の接近に関するデータを送信し、特定のソフトウェアが人の次の動作を予測し、それに応じてロボットの軌道を変更します。
鑫松関節ロボット

Sinsong多関節ロボットは、国内初の7自由度協働ロボットです。迅速な設定、トラクションティーチング、視覚誘導、衝突検知などの機能を備えています。高荷重と低コストという強力なメリットを備え、ユーザーの投資回収サイクルの短縮とロボットへの要求を満たします。製品の安全性、柔軟性、そして人と機械の協調性といった要件を満たし、コンパクトなレイアウトと高精度を備えた柔軟な生産ラインに適しており、精密組立、製品包装、研削、試験、工作機械の積み下ろしなどの産業工程のニーズを満たします。
ハンのエルフィン人機協働ロボット

このマンマシン協働ロボット「エルフィン」は、独自のデュアルジョイントモジュール構造設計を採用し、組み立てやメンテナンスが容易です。斬新で滑らかな外観が特徴です。コントローラと各シャットダウン間の通信にはEtherCATバスを採用し、10KHzの制御周波数でも優れた耐干渉性能を発揮します。高剛性設計により、±0.03mmの再現精度を実現し、統合自動化製品ライン、溶接、研磨、組立、ピッキング、塗装などの作業現場に活用できます。
ユニバーサルロボット UR10 ヒューマンマシン協働ロボット

ユニバーサルロボットUR10は、高い精度と信頼性が求められる大規模な作業向けに設計されています。最大10kgの工程と操作を自動処理します。梱包、積み重ね、組み立て、ピックアンドプレースなどの重作業を伴う協働作業にもUR10は最適です。UR10は1300mmの伸縮半径を備えており、より広い範囲での操作をより効率的に処理できます。これにより、距離の影響を受ける生産ラインの時間を節約できます。ユニバーサルロボットUR10は、プログラミングが容易で、セットアップも迅速、協働作業と安全性に優れています。
NACHI双腕協働ロボットMZ04E

NACHIの双腕協働ロボットMZ04Eは、工場の生産工程において人的資源の一部を代替し、単一のCPUで双腕を制御して相互整合を実現することで、スマートフォンの組み立てなど、より困難で微細な作業をスムーズかつ正確に実行できます。中空手首の巧妙なケーブル配線により、マニピュレータケーブルは手首の中空構造を通してインテリジェントに配線されます。シンプルな散在配線により周辺機器との干渉を防ぎ、設備の信頼性を大幅に向上させます。

TEL : + 86-4000988557;
スカイプ ID: gfreex@hotmail.com;
WeChat: STEP_ADTECH;
QQ ID: 8936906.




















読んで、投稿を続け、購読してください。 何 を教えてください。あなた 考える
 IPv6 サポートされているネットワーク 粤ICP备2021036697号
IPv6 サポートされているネットワーク 粤ICP备2021036697号 オンラインサービス
オンラインサービス 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com